附圖說明:
圖1為本實用新型電磁風扇離合器無級調(diào)速控制策略的控制流程圖;
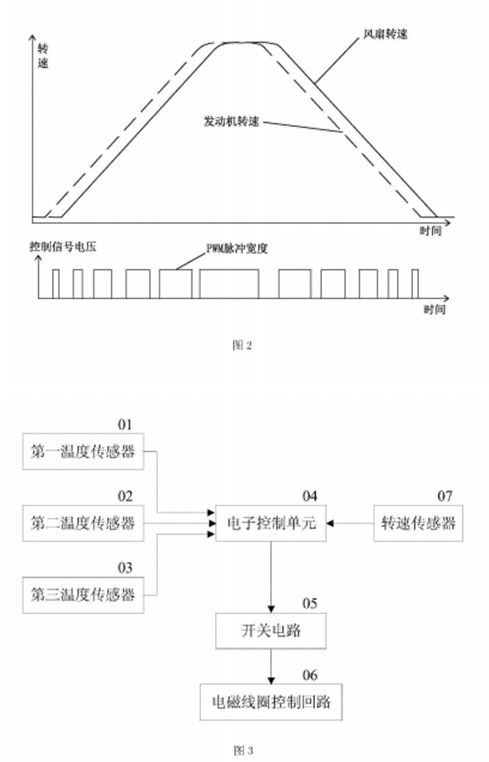
圖2為本實用新型電磁風扇離合器無級調(diào)速控制策略形成的控制曲線示意圖;
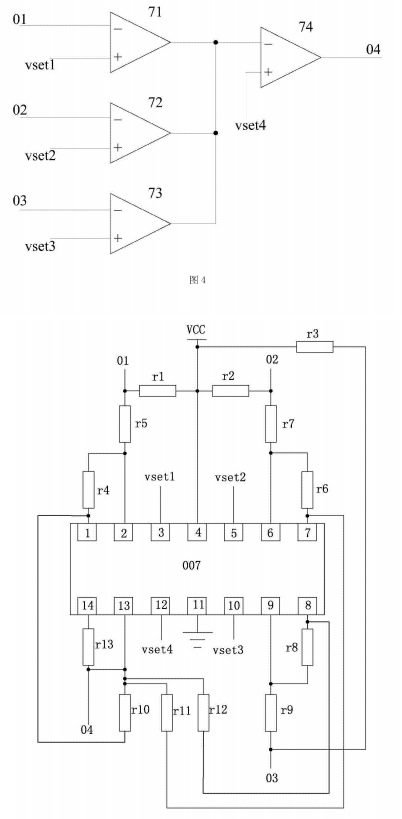
圖3為實現(xiàn)本實用新型無級調(diào)速控制策略的無級調(diào)速控制裝置的原理示意圖,
圖4為本實用新型的無級調(diào)速控制裝置信號采集部分的集成運放電路原理示意圖,
圖5為本實用新型的無級調(diào)速控制裝置信號采集部分的集成運放電路一種具體結(jié)構(gòu)示意圖;
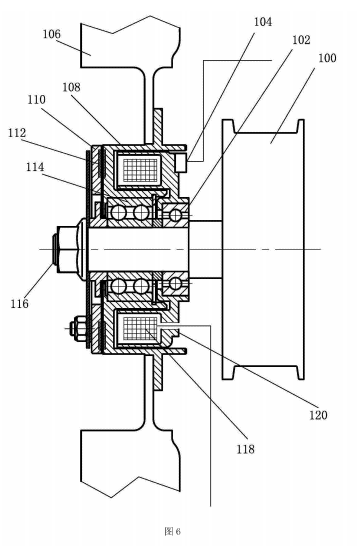
圖6為利用本實用新型的無級調(diào)速控制裝置的一種電磁風扇離合器的結(jié)構(gòu)示意圖。
具體實施方式:為了使電磁風扇離合器帶動的風扇可以隨發(fā)動機運行時的溫度變化動態(tài)改變轉(zhuǎn)速,保證發(fā)動機正常工況時的工作溫度,完成對應(yīng)發(fā)動機散熱量平滑調(diào)整風扇轉(zhuǎn)速,實現(xiàn)電磁風扇離合器無級調(diào)速,本實用新型的控制策略應(yīng)用了電子信號采集反饋和PWM信號脈沖寬度調(diào)制技術(shù)。
主要通過以下步驟實現(xiàn)無級調(diào)速控制:
步驟1,設(shè)置溫度傳感器實時采集發(fā)動機循環(huán)管路上的水溫、氣溫和油溫信號,設(shè)置轉(zhuǎn)速傳感器實時采集電磁風扇離合器被動盤的轉(zhuǎn)速信號,電子控制單元接收復合溫度信號形成溫度變化趨勢數(shù)據(jù),電子控制單元接收轉(zhuǎn)速信號形成電磁風扇離合器即時輸出功率數(shù)據(jù);
步驟2,電子控制單元根據(jù)溫度變化趨勢數(shù)據(jù)調(diào)整輸出的脈沖信號占空比和占空比變化速率,形成電磁風扇離合器主動盤與被動盤吸合/分離的脈沖控制信號;
步驟3,設(shè)置開關(guān)電路或信號放大電路,使脈沖控制信號形成驅(qū)動信號,驅(qū)動電磁風扇離合器的電磁線圈控制回路通斷;
步驟4,電磁風扇離合器的主動盤與被動盤根據(jù)發(fā)動機循環(huán)管路的溫度變化趨勢吸合/分離,傳速相應(yīng)的輸出功率帶動風扇降溫。
如圖 1所示,本實用新型的電磁風扇離合器無級調(diào)速控制策略的具體控制步驟如下:
步驟s01,啟動發(fā)動機、電子控制單元;
步驟s02,利用溫度傳感器采集發(fā)動機工作時的溫度信號;
步驟s03,電子控制單元判斷溫度信號變化趨勢;
步驟s04,當溫度上升時執(zhí)行步驟s10;
步驟s10,當溫度趨勢變陡時,即溫度上升速率變大時,執(zhí)行步驟s11,當溫度趨勢變緩時,即溫度上升速率變小時,執(zhí)行步驟s12;
步驟s11,電子控制單元調(diào)整控制電磁線圈控制回路通斷的脈沖信號,使脈沖變寬,即占空比變大(在0%至100%之間變化,當發(fā)動機全速運轉(zhuǎn)時為100%,當發(fā)動機低速運轉(zhuǎn)時為0),然后執(zhí)行步驟s13,
步驟s12,電子控制單元調(diào)整控制電磁線圈控制回路通斷的脈沖信號,使脈沖變窄,即占空比變小(在0%至100%之間變化,當發(fā)動機全速運轉(zhuǎn)時為100%,當發(fā)動機低速運轉(zhuǎn)時為0),然后執(zhí)行步驟s13;
步驟s13,電子控制單元輸出脈沖信號;
步驟s14,脈沖信號控制電磁線圈控制回路接通;
步驟s15,電磁線圈產(chǎn)生電磁場使主動盤與被動盤吸合;
步驟s16,被動盤帶動風扇加速轉(zhuǎn)動;
步驟s17,利用速度傳感器采集發(fā)動機工作時電磁風扇離合器被動盤的轉(zhuǎn)速信號;
步驟s18,電子控制單元判斷被動盤轉(zhuǎn)速、溫度信號及離合器狀態(tài);
步驟s19,當轉(zhuǎn)速未達到高設(shè)定值時,跳轉(zhuǎn)至步驟s02,當轉(zhuǎn)速達到高設(shè)定值時,執(zhí)行步驟s20,此處轉(zhuǎn)速高設(shè)定值為3000rpm;
步驟s20,當高設(shè)定值轉(zhuǎn)速未達到設(shè)定持續(xù)時間跳轉(zhuǎn)至步驟s02,當高設(shè)定值轉(zhuǎn)速達到設(shè)定持續(xù)時間,執(zhí)行步驟s28,此處持續(xù)時間為3min,
步驟s28,電子控制單元發(fā)出告警信號,跳轉(zhuǎn)至步驟s02 ;
步驟s21,當溫度達到高設(shè)定值時,跳轉(zhuǎn)至步驟s28,當溫度未達到高設(shè)定值時,執(zhí)行步驟s22,此處溫度高設(shè)定值為90攝氏度;
步驟s22,當脈沖信號占空比不是最大時(即占空比不為1時),跳轉(zhuǎn)至步驟s02,當脈沖信號占空比是最大時,執(zhí)行步驟s23;
步驟s23,當被動盤轉(zhuǎn)速低于限定值時,執(zhí)行步驟s28,當被動盤轉(zhuǎn)速高于限定值時,跳轉(zhuǎn)至步驟s02,此處的限定值為1500rpm;
步驟s04,當溫度下降時執(zhí)行步驟s30;
步驟s30,當溫度趨勢變陡時,即溫度變化速度變大時,執(zhí)行步驟s31,當溫度趨勢變緩時,即溫度變化速度變小時,執(zhí)行步驟s32;
步驟s31,電子控制單元調(diào)整控制電磁線圈控制回路通斷的脈沖信號,使脈沖變窄,即占空比變小(0至1之間變化),然后執(zhí)行步驟 s33;
步驟s32,電子控制單元調(diào)整控制電磁線圈控制回路通斷的脈沖信號,使脈沖變寬,即占空比變大,然后執(zhí)行步驟s33;
步驟s33,電子控制單元輸出脈沖信號;
步驟s34,脈沖信號控制電磁線圈控制回路斷開;
步驟s35,電磁線圈消除電磁場使主動盤與被動盤分離;
步驟s36,風扇隨被動盤減速轉(zhuǎn)動;
步驟s37,利用速度傳感器采集發(fā)動機工作時電磁風扇離合器被動盤的轉(zhuǎn)速信號;
步驟s38,電子控制單元判斷被動盤轉(zhuǎn)速、溫度信號及離合器狀態(tài);
步驟s39,當轉(zhuǎn)速未達到最低值時,跳轉(zhuǎn)至步驟s02,當轉(zhuǎn)速達到最低值時,執(zhí)行步驟s40,此處轉(zhuǎn)速最低值為500rpm;
步驟s40,當最低轉(zhuǎn)速未達到設(shè)定持續(xù)時間跳轉(zhuǎn)至步驟s02,當最低轉(zhuǎn)速達到設(shè)定持續(xù)時間,執(zhí)行步驟s28;
步驟s28,電子控制單元發(fā)出告警信號跳轉(zhuǎn)至步驟s02;
步驟s41,當溫度達到低設(shè)定值時,跳轉(zhuǎn)至步驟s28,當溫度未達到低設(shè)定值時,執(zhí)行步驟s42,此處溫度低設(shè)定值為80攝氏度;
步驟s42,當脈沖信號占空比不是最小時(即占空比不等于0時),跳轉(zhuǎn)至步驟s02,當脈沖信號占空比是最小時,執(zhí)行步驟s43;
更多詳情請瀏覽無級調(diào)速控制裝置及電磁風扇離合器第四節(jié)






