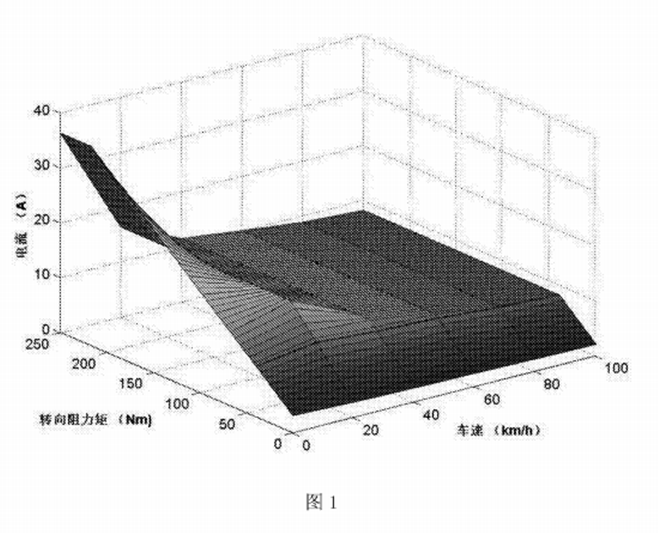
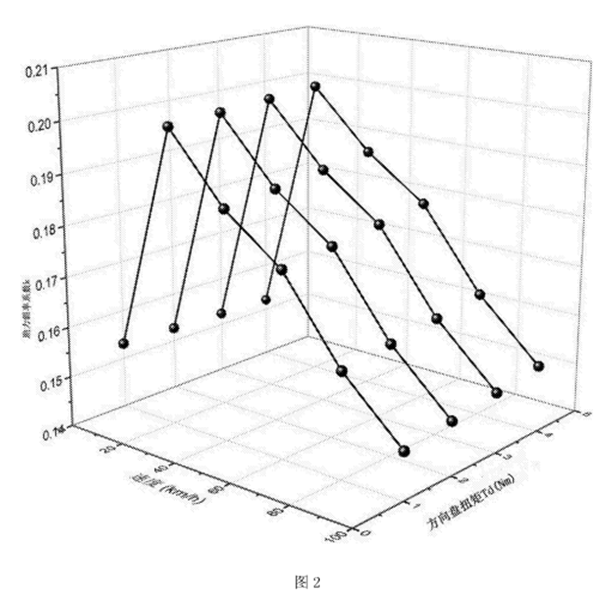
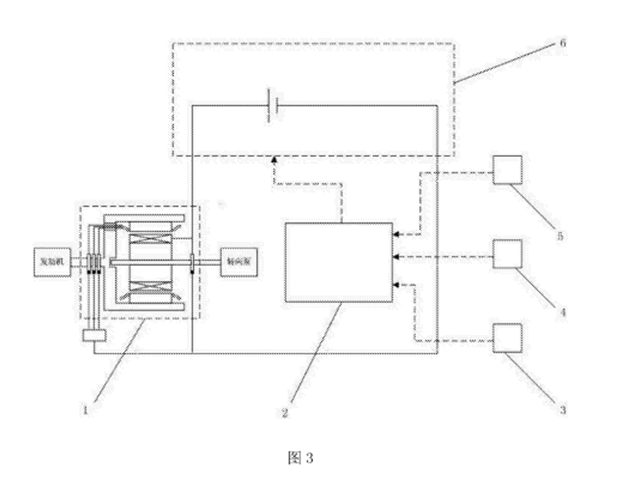
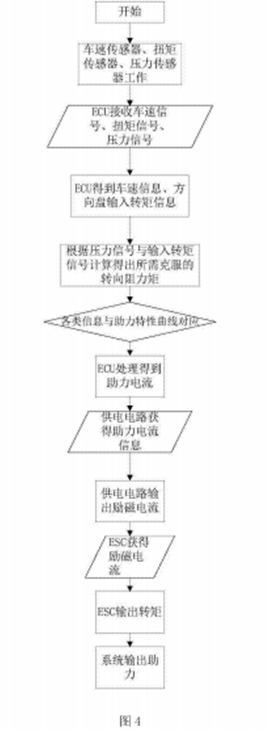
附圖說(shuō)明:圖1為一種重型車(chē)輛電磁離合器轉(zhuǎn)向助力控制系統(tǒng)在一種輸入轉(zhuǎn)矩下助力特性曲線(xiàn);圖2為助力斜率系數(shù)K與車(chē)速和方向盤(pán)扭矩的關(guān)系圖;圖3為一種重型車(chē)輛電磁離合器轉(zhuǎn)向助力控制系統(tǒng)結(jié)構(gòu)示意圖;圖4為一種重型車(chē)輛電磁離合器轉(zhuǎn)向助力控制系統(tǒng)工作流程圖。圖中標(biāo)記:1、電磁轉(zhuǎn)差離合器;2、控制單元;3、輪速傳感器;4、組矩傳感器; 5、壓力傳感器,6、供電電路。
具體實(shí)施方式:如圖3所示,本發(fā)明提出了一種重型車(chē)輛電磁離合器轉(zhuǎn)向助力控制系統(tǒng),包括電磁轉(zhuǎn)差離合器1,控制單元2,輪速傳感器3,扭矩傳感器4,圧力傳感器5,供電電路6。電磁轉(zhuǎn)差離合器1為勵(lì)磁式電磁轉(zhuǎn)差離合器,控制單元為車(chē)載電控單元ECU。供電電路6由供電電源和輸電線(xiàn)路組成;輪速傳感器3、扭矩傳感器4和圧力傳感器5均與控制單元2的輸入端相連,控制單元2的輸出端與供電電路6相連,供電電路6與勵(lì)磁式電磁轉(zhuǎn)差離合器相連,供電電路6 給勵(lì)磁式電磁轉(zhuǎn)差離合器供電,勵(lì)磁式電磁轉(zhuǎn)差離合器輸出轉(zhuǎn)速至轉(zhuǎn)向泵,勵(lì)磁式電磁轉(zhuǎn)差離合器設(shè)置在發(fā)動(dòng)機(jī)與轉(zhuǎn)向泵之間。
勵(lì)磁式電磁轉(zhuǎn)差離合器為電磁轉(zhuǎn)差離合器的電控液壓助力轉(zhuǎn)向系統(tǒng)(E-ECHPS)的關(guān)鍵動(dòng)力組件,采用勵(lì)磁形式產(chǎn)生內(nèi)部電磁場(chǎng),由離合器主動(dòng)部分轉(zhuǎn)動(dòng)切割磁力線(xiàn)產(chǎn)生力,從而使離合器主動(dòng)與被動(dòng)部分發(fā)生同向旋轉(zhuǎn),同時(shí)主動(dòng)與被動(dòng)部分轉(zhuǎn)速存在差值,且差值大于零。
輪速傳感器3安置在車(chē)輪軸上,輪速傳感器3采用霍爾式輪速傳感器,霍爾式輪速傳感器由傳感頭和齒圈組成(傳感頭由永磁體、霍爾式元件和電子電路組成),應(yīng)用在爾式原理進(jìn)行工作,具有輸出信號(hào)電壓振幅不受轉(zhuǎn)速影響、頻率響應(yīng)高、抗電磁波干擾能力強(qiáng)的特點(diǎn)。 輪速傳感器3也可與現(xiàn)階段車(chē)輛廣泛安裝的ABS/ESP系統(tǒng)的輪速傳感器并用。
扭矩傳感器4安裝在方向盤(pán)轉(zhuǎn)動(dòng)桿上,組矩傳感器4采用非接觸式扭矩傳感器,非接觸式扭矩傳感器由輸入軸和輸出軸通過(guò)扭桿相連,輸入軸上有花鍵,輸出軸上有鍵槽。當(dāng)扭桿受方向盤(pán)的轉(zhuǎn)動(dòng)力矩作用發(fā)生扭轉(zhuǎn)時(shí),輸入軸上的花鍵和輸出軸上的鍵槽之間的相對(duì)位置發(fā)生改變。花鍵和鍵槽的相對(duì)位移改變量等于組轉(zhuǎn)桿的扭轉(zhuǎn)量,使得花鍵上的磁感強(qiáng)度改變,磁感強(qiáng)度的變化,通過(guò)線(xiàn)圈轉(zhuǎn)化為電壓信號(hào)進(jìn)行輸出。非接觸式扭矩傳感器由于釆用非接觸的工作方式,因而壽命長(zhǎng)、可靠性高、不易受到磨損、有更小的延時(shí)、受軸的偏轉(zhuǎn)和軸向偏移的影響小,被廣泛用于汽車(chē)領(lǐng)域。
壓力傳感器5安置在液壓缸內(nèi),壓力傳感器5采用壓電式壓力傳感器,壓電式壓力傳感器原理基于壓電效應(yīng)。壓電效應(yīng)是某些電介質(zhì)在沿一定方向上受到外力的作用而變形時(shí),其內(nèi)部會(huì)產(chǎn)生極化現(xiàn)象,同時(shí)在它的兩個(gè)相對(duì)表面上出現(xiàn)正負(fù)相反的電荷。當(dāng)外力去掉后,它又會(huì)恢復(fù)到不帶電的狀態(tài),這種現(xiàn)象稱(chēng)為正壓電效應(yīng)。當(dāng)作用力的方向改變時(shí),電荷的極性也隨之改變。相反,當(dāng)在電介質(zhì)的極化方向上施加電場(chǎng),這些電介質(zhì)也會(huì)發(fā)生變形,電場(chǎng)去掉后,電介質(zhì)的變形隨之消失,這種現(xiàn)象稱(chēng)為逆壓電效應(yīng)。壓電式壓力傳感器的種類(lèi)和型號(hào)繁多,按彈性敏感元件和受力機(jī)構(gòu)的形式可分為膜片式和活塞式兩類(lèi)。膜片式主要由本體、膜片和壓電元件組成。壓電元件支撐于本體上,由膜片將被測(cè)壓力傳遞給壓電元件,再由壓電元件輸出與被測(cè)壓力成一定關(guān)系的電信號(hào)。這種傳感器的特點(diǎn)是體積小、動(dòng)態(tài)特性好、耐高溫等。
上述三個(gè)傳感器的信號(hào)傳輸電路均與控制單元相連;控制單元2包括輪速傳感器信號(hào)接收端,扭矩傳感器信號(hào)接收端,圧力傳感器信號(hào)接收端,信號(hào)處理單元,助力電流信號(hào)輸出端;輪速傳感器信號(hào)接收端與輪速傳感器3相連,組矩信號(hào)接收端與組矩傳感器4相連,壓力信號(hào)接收端與壓力傳感器5相連,助力電流信號(hào)輸出端與供電電路相連。
助力電流隨不同車(chē)速下的K値成正比線(xiàn)性變化,助力電流隨轉(zhuǎn)向阻力矩 Ta的増大而增大,當(dāng)方向盤(pán)轉(zhuǎn)知Td達(dá)到某一車(chē)速下對(duì)應(yīng)的方向盤(pán)理想轉(zhuǎn)矩后,不再變化,K=0。K值隨車(chē)速的增大而降低,電流峰値小于前一個(gè)車(chē)速的峰值, 以滿(mǎn)足高速行使時(shí)轉(zhuǎn)向的路感。原地轉(zhuǎn)向時(shí),電流峰值最大,以滿(mǎn)足低速行使,特別是原地轉(zhuǎn)向時(shí)轉(zhuǎn)向的輕便。
如圖1所示, 一種重型車(chē)輛電磁離合器轉(zhuǎn)向助力控制系統(tǒng)在一種輸入轉(zhuǎn)矩下助力特性曲線(xiàn), ECU中信號(hào)處理單元中儲(chǔ)存有預(yù)先標(biāo)定的在某一車(chē)速和某一方向盤(pán)輸入轉(zhuǎn)矩時(shí)的ESC所需電流值;電流值是根據(jù)不同車(chē)速下,不同的轉(zhuǎn)向阻力所確定的,而轉(zhuǎn)向阻力矩是要根據(jù)輸入轉(zhuǎn)矩折算而得,所以不同方向盤(pán)輸入轉(zhuǎn)矩,相同車(chē)速下輸入電流會(huì)有不同。圖1中的橫坐標(biāo)是轉(zhuǎn)向阻力知和車(chē)速,縱坐標(biāo)是輸出電流,輸出電流根據(jù)不同車(chē)速和轉(zhuǎn)向阻力矩確定。
如圖4所示,為本發(fā)明提出的一種重型車(chē)輛電磁離合器轉(zhuǎn)向助力控制系統(tǒng)的控制流程圖,包括步驟如下:步驟1,利用輪速傳感器(3)獲得輪速信息,利用扭矩傳感器(4)獲得方向盤(pán)組矩信息,利用壓力傳感器(5)獲得液壓缸內(nèi)部壓力信息;步驟2,控制單元(2)接收輪速信息,方向盤(pán)組矩信息和液壓缸內(nèi)部壓力信息;步驟3,控制單元(2)處理方向盤(pán)扭矩信息,獲得方向盤(pán)扭矩大小;步驟4,控制單元(2)處理液壓缸內(nèi)部壓力信息,獲得此時(shí)的壓力値,進(jìn)而處理得到此時(shí)的轉(zhuǎn)向阻力矩Ta;步驟5,控制單元(2)處理輪速信息,獲得輪速大小,并利用方向盤(pán)扭矩大小,處理獲得助力斜率K;步驟6,控制單元(2)根據(jù)轉(zhuǎn)向阻力定Ta大小和助力斜率系數(shù)K的大小,計(jì)算得出此時(shí)段系統(tǒng)所需助力電流I的值,I= KTa;步驟7,控制單元(2)將助力電流I,輸出給供電電路(6);步驟8,供電電路(2)輸出相應(yīng)大小的勵(lì)磁電流I給電磁轉(zhuǎn)差離合器;步驟9,電磁轉(zhuǎn)差離合器(1)輸出相應(yīng)轉(zhuǎn)速,即轉(zhuǎn)向助力系統(tǒng)輸出相應(yīng)助力。