通過參考附圖詳細描述本發(fā)明,其中:
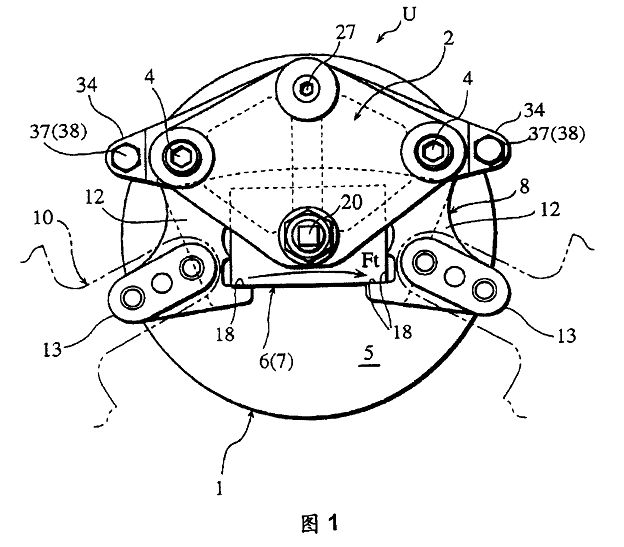
圖1所示為表示本發(fā)明優(yōu)選實施例的左側視圖;
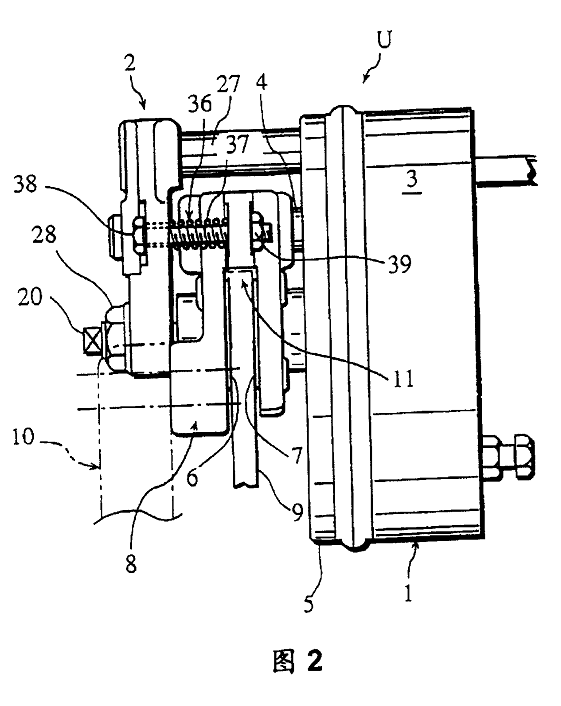
圖2所示為表示本發(fā)明優(yōu)選實施例的正視圖;
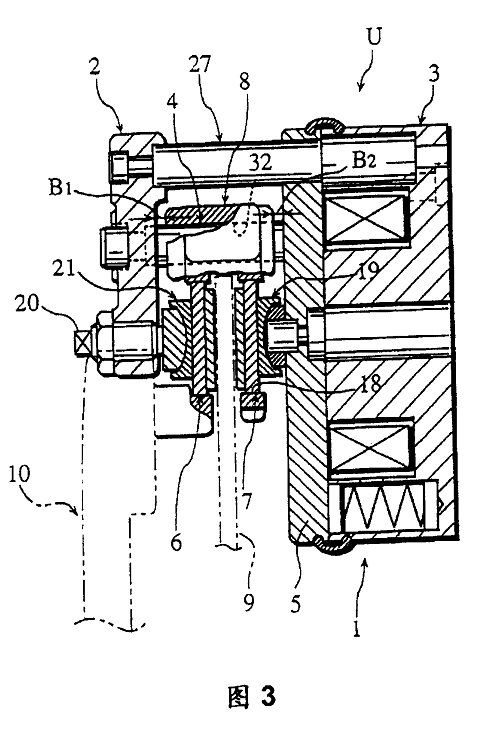
圖3所示為表示帶有部分剖面的本發(fā)明優(yōu)選實施例的正視圖;
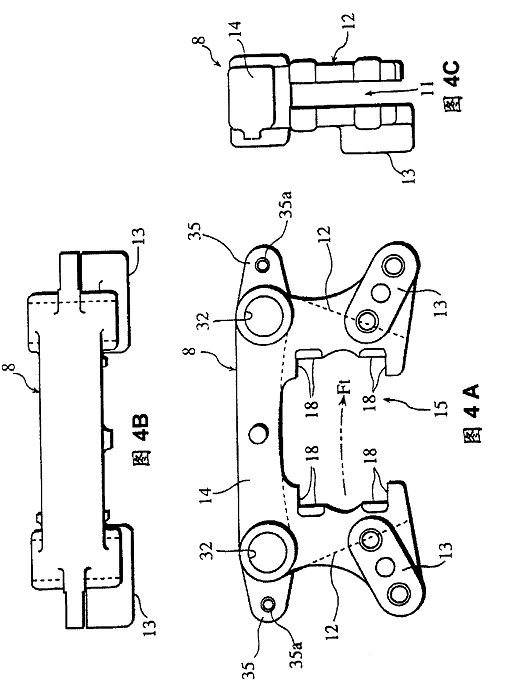
圖4A所示為表示制動力承受支架實例的解釋性視圖;
圖4B所示為表示制動力承受支架實例的解釋性視圖;
圖4C所示為表示制動力承受支架實例的解釋性視圖;
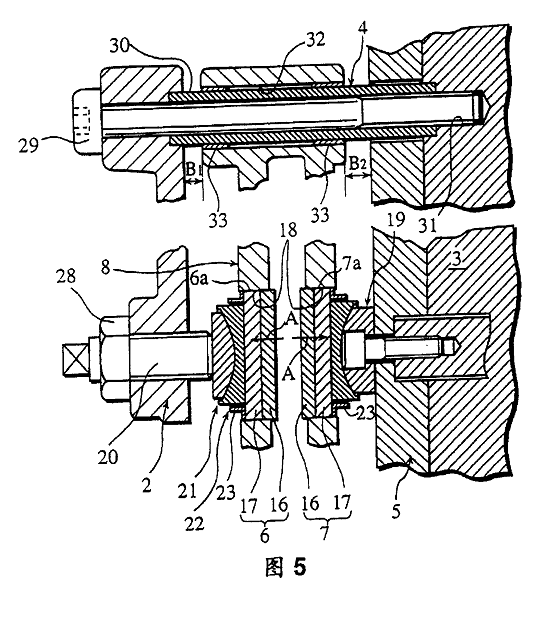
圖5所示為帶有主要部分剖面的解釋性視圖;
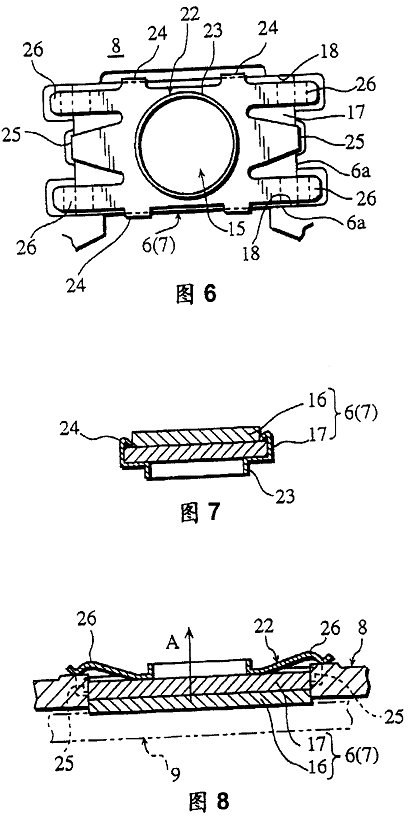
圖6所示為帶有主要部分剖面的解釋性視圖;
圖7所示為帶有主要部分剖面的解釋性視圖;
圖8所示為帶有主要部分剖面的解釋性視圖;
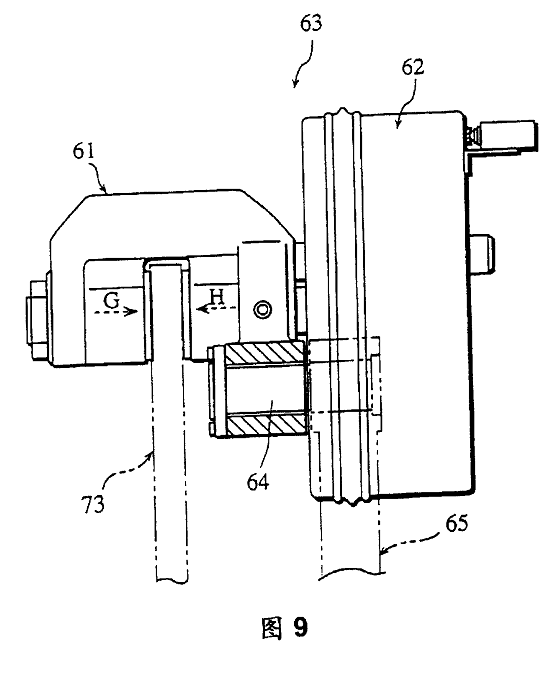
圖9所示為表示傳統(tǒng)實例的正視圖;
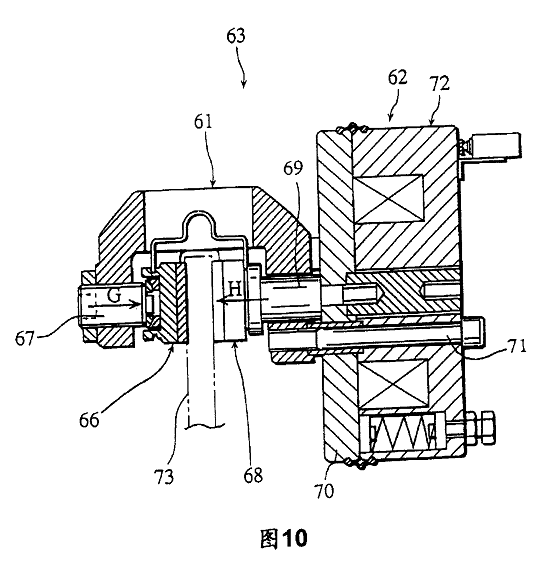
圖10所示為表示傳統(tǒng)實例的剖面正視圖。
現(xiàn)在通過參考附圖對本發(fā)明的優(yōu)選實施例進行詳細描述。
在圖1的左側視圖、圖2的正視圖和圖3的帶有部分剖面的正視圖中,該電磁制動器具有一種結構,在該結構中省去了傳統(tǒng)的卡鉗,U形單元改為通過把一塊板體2布置為大致與電磁部分1平行并具有一個預定間距,電磁部分1的固定鐵芯3和板體2通過多個導桿4連接并結合起來實現(xiàn)的。
用于承受一對制動蹄片6和7的切向力Ft的制動力承受支架8位于U形單元的電磁部分1和板體2之間。
9表示由上述制動蹄片6和7的擠壓制動的制動蹄如制動盤(圓盤狀)、(帶狀板的)板件等。在本發(fā)明中,在制動蹄片6和7在制動中從制動體9得到的力中切向力Ft是一個沿制動體9運行方向的力。
在制動體9作旋轉運動的情況下,即是一個制動盤,切線方向的力作用在制動蹄片6和7上。該力被稱為切向力Ft,在圖1中用箭頭表示。在制動體9作直線運動的情況下,切向力是沿直線運動的方向。
制動力承受支架8固定在固定元件10上,如絞車齒輪箱的基座(基架)、建筑物等。也就是說,前面所述的U形單元通過支架8連接在固定元件10上。
如圖4中所示的支架8具有一個制動體9插入其中的凹槽,并且如圖4A正視圖中所示整體上呈拱形。由于上述凹槽的存在,每個左和右腿部分12分成兩個分枝,帶螺絲孔的裝配部分13在腿部分12的下端部分形成,支架8通過把螺栓孔中固定在上述固定元件10(如圖1和圖3中所示)上。
制動蹄片6和7位于由拱形支架8的左和右腿部分12和上側部分14圍成的內部空間15中,在圖5到圖8中,每個制動蹄片6和7包括一個直接接觸制動體9的制動襯片部分16和制動襯片部分16固定其上的制動蹄片主體部分17。制動襯片部分16和制動蹄片主體部分17都是分別在矩形板上形成的,分層,并結合起來。
滑動面18形成在支架8的內側,用于在制動蹄片6和7的四角部分容納制動蹄片6和7的側面6a和7a,使其能沿制動蹄片6和7的壓-作用方向(圖3和圖5中的水平方向)滑動。如上所述,一對制動蹄片6和7被支架8所包圍,能夠沿制動蹄片6和7的壓-作用方向滑動,并受支架8夾持不能沿切向力Ft的方向移動。這里有一個優(yōu)點,即當矩形板制動蹄片6和7被在四個角部分夾持時,制動蹄片被穩(wěn)定地夾持住。